



AWE带角度数显扭矩扳手
- ¥:
- 2,180.00 - 6,000.00
- 型号:
- AWE
- AWE:
- AWE2-010R AWE2-030 RAWE3-030 RAWE3-060R AWE3-085R AWE3-135R AWE4-135R AWE4-200R AWE4-340R AWE6-500R AWE6-850R






AWE带角度扭矩扳手使用说明书
1、 系统概述
1.1主要用途及适用范围
AWE带角度数显扭矩扳手是一款新型的数显扳手。可以直接并准确的读出扭矩-角度值,使用简单,易于操作。适用于汽车行业、机械行业等的螺栓紧固及控制。
1.2功能特点
1.2.1 可直接读出扭矩-角度值;
1.2.2 ±1°(转动90°速度在30°/sec);
1.2.3 ±1%;
1.2.4 可顺时针和逆时针测量;
1.2.5 蜂鸣器、LED和振动器提示目标值;
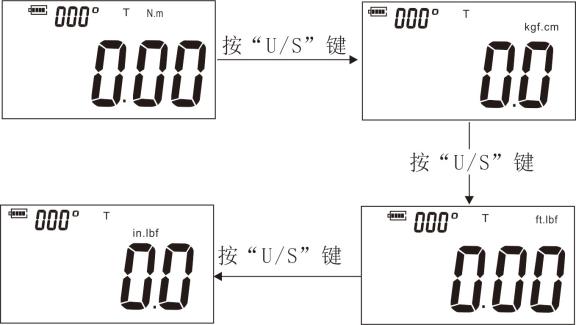
1.2.6 四种扭力单位:N.m、kfg.cm、ft.lbf、in.lbf等。
1.2.7 角度单位为度(°)
1.2.8 自带3.7V锂电池,通过USB可以直接对锂电池充电;
1.2.9 自带usb接口,可上传保存数据。
1.2.10 测量模式:实时模式、峰值模式和预置模式三种测量模式。
1.2.11 自动背光功能;
1.3 规格参数
|
型号 |
不带通讯 |
AWE2 -0010 |
AWE2 -0030 |
AWE3-0030 |
AWE3-0060 |
AWE3-0085 |
AWE3 -0135 |
AWE4 -0135 |
AWE4 -0200 |
AWE4 -0340 |
AWE6- 0500 |
AWE6- 0850 |
|
带通讯 |
AWE2 -0010R |
AWE2 -0030R |
AWE3-0030R |
AWE3-0060R |
AWE3-0085R |
AWE3 -0135R |
AWE4 -0135R R |
AWE4 -0200R |
AWE4 -0340R |
AWE6- 0500R |
AWE6- 0850R |
|
|
最小分度值 |
0.01 |
0.1 |
||||||||||
|
最大操作范围 (N.m) |
10N.m/7.37ft.lb/88.50in.lb/101.97kgf.cm |
30N.m/22.12ft.lb/265.5in.lb/305.91kgf.cm |
30N.m/22.12ft.lb/265.5in.lb/305.91kgf.cm |
60N.m/44.25ft.lb/531.04in.lb/611.82kgf.cm |
85N.m/62.69ft.lb/752.31in.lb/866.75kgf.cm |
135N.m/99.57ft.lb/1195in.lb/1376.61kgf.cm |
135N.m/99.57ft.lb/1195in.lb/1376.61kgf.cm |
200N.m/147.5ft.lb/1770in.lb/2039.43kgf.cm |
340N.m/250ft.lb/3009in.lb/3467.03kgf.cm |
500N.m/4424in.lb/368.7ft.lb/5098.58kgf.cm |
850N.m/7521in.lb/626.8ft.ln/8667.58kgf.cm |
|
|
连接头(inches) |
1/4 |
3/8 |
1/2 |
3/4 |
||||||||
|
长度 |
390 |
420 |
535 |
655 |
||||||||
|
扭力精度*1 |
±1% |
|||||||||||
|
角度精度 |
±1°(角度在每秒30°的速度转90°下测量之精度) |
|||||||||||
|
资料存储容量 |
255 |
|||||||||||
|
操作模式 |
峰值模式(P)/实时模式(T)/预置模式(Pre) |
|||||||||||
|
单位 |
N.m、kgf.cm、ft.lbf、in.lbf |
|||||||||||
|
棘轮头形式 |
双向棘轮头 |
|||||||||||
|
棘轮头齿数 |
36 |
48 |
||||||||||
|
按键数 |
5 |
|||||||||||
|
电池 |
3.7V锂电池 |
|||||||||||
|
操作温度 |
-10℃~60℃ |
|||||||||||
|
存储温度 |
-20℃~70℃ |
|||||||||||
|
湿度 |
无凝露可到90% |
|||||||||||
|
摔落测试高度 |
1米 |
|||||||||||
|
振动测试条件*2 |
10G |
|||||||||||
|
寿命测试*3 |
10000次 |
|||||||||||
二、产品组件
2.1产品结构


2.2液晶显示图

1、 双向棘轮头 2、转向拨片
3、LED指示灯 4、LCD屏幕
%1、 按键 6、蜂鸣器
7、电池盒 8、电池盖
9、棘轮扭力方头 10、USB/充电接口
11、充电指示灯 12、握把
13、电池电量显示 14、角度值显示
15、工作模式 16、单位显示
17、扭力方向 18、扭力值显示
19、向上/预置值解锁按键 20、存储/查看按键
21、向下/工作模式切换按键 22、单位切换/菜单按键
23、电源/置零按键
三、工作模式说明
3.1 工作模式切换

3.2 实时模式操作
实时测量模式跟随施加扭矩值和旋转角度值(旋转角度值时通过扭矩值大于0时开始计算选择角度)。当卸载扭力,扭力值到零时,角度自动清零。
液晶屏显示为T时,为实时模式,如果不显示T,请按“ ”键进行模式切换。操作步骤如下图所示:
”键进行模式切换。操作步骤如下图所示:

NOTE1:实时模式下,扭力值大于0时,就会显示角度值.
NOTE2:实时模式下,达到预设目标力值的90%时,蜂鸣器开启后,红灯闪烁,蜂鸣器短鸣;振动器开启后,红灯闪烁,振动器间断振动,振动频率根据扭力接近程度提高震动频率
NOTE3:实时模式下,蜂鸣器开启后,达到或大于预设目标扭力值时,红灯长亮,蜂鸣器长鸣;振动器开启后,红灯长亮,振动器连续振动。
NOTE4:蜂鸣器和振动器不能同时启用。若用户开启蜂鸣器后,振动器自动关闭;若开启振动器,则蜂鸣器自动关闭。
3.3 峰值模式
在峰值测量模式下,当施加扭力时,扳手将锁住最大施加扭力和最大角度,并将其显示在液晶屏上。当卸载扭力时,峰值扭力和峰值角度将被锁定,当再次加载时LCD液晶屏将不更新已锁定峰值。当开启自动保存功能时,扳手会自动保存力值和角度,并自动清零,需进行下次测量时,直接加载扭力。当未开启自动保存功能时可通过按“M”键保存或通过按“P/C”键清零。
液晶屏显示P为峰值模式,如果不显示P,请按“”键进行切换。峰值模式操作步骤如下图所示:

NOTE1:峰值模式下,首次测量时当扭力值大于0时,扳手显示角度与扭力值;但是当继续施力时(不清零且不保存数值的情况下),本次测量扭力值大于首次测量力值时角度值才会跟随扭力值变动。
NOTE2:峰值模式下,达到预设目标扭力值的90%时,蜂鸣器开启后,红灯闪烁,蜂鸣器短鸣;振动器开启后,红灯闪烁,振动器间续振动。
NOTE3:实时模式下,蜂鸣器开启后,达到预设目标扭力值时,红灯长亮,蜂鸣器长鸣;振动器开启后,红灯长亮,振动器连续振动。
NOTE4:蜂鸣器和振动器不能同时启用。若用户开启蜂鸣器后,振动器自动关闭;若开启振动器,则蜂鸣器自动关闭。
3.4 预置模式
预置模式是采用扭力值达到目标值后,继续给要锁紧螺丝一定的角度而设计的。当施加的扭力值大于等于目标扭力值时,扳手开始计算角度值。当卸载扭力时,扭力值和角度值自动锁死。
液晶屏显示Pre为预置模式,如果不显示Pre,请按“”键进行切换。预置模式操作步骤如下图所示:

NOTE1:预置模式下,达到预设目标扭力值时,扳手才会显示角度。
NOTE2:预置模式下,达到预设目标扭力值的90%时,红灯闪烁。
NOTE3:预置模式下,蜂鸣器开启后,达到预设目标扭力值时,红灯长亮,蜂鸣器短鸣;振动器开启后,红灯长亮,振动器间续振动。
NOTE4:蜂鸣器和振动器不能同时启用。若用户开启蜂鸣器后,振动器自动关闭;若开启振动器,则蜂鸣器自动关闭。
四、使用方法
4.1 开机
短按“P/C”键开机,开始后如果电量显示不足,则自动关机,充电后方可正常使用。
4.2 单位切换
4.3设置预置值
先按“P/C”键开机,按“”键,判断按键锁是否已开启。如果按键锁已开启,可通过系统设置中的“按键锁”来关闭按键锁功能(详见下文“系统设置”)。若按键锁未开启,会显示字母“ ”,然后可以按“”键,增加目标值,或者按“”键,减小目标值。设置完成后,按“U/S”键保存退出。
”,然后可以按“”键,增加目标值,或者按“”键,减小目标值。设置完成后,按“U/S”键保存退出。
4.4 清零
①当扳手力值为0时,按“P/C”键,会显示“ ”,此时表示为角度校准清零。在角度清零时,请将扳手放置在平面上静止,直到角度清零完成。
”,此时表示为角度校准清零。在角度清零时,请将扳手放置在平面上静止,直到角度清零完成。
②当扳手有力值显示时,按“P/C”键直接将力值清零,角度不清零。
4.5 数据保存和查看
4.5.1 数据保存
①在测量界面短按“M”键,显示“ ”时,表示保存成功。当力值为零时,无法保存,会提示“
”时,表示保存成功。当力值为零时,无法保存,会提示“ ”。
”。
②自动保存:在峰值模式和预置模式下,在系统设置中设置自动保存时间不为0时,扳手会自动保存扭力值。当自动保存时间为0时,则扳手不会自动保存扭力值,用户需手动按“M”键保存扭力值。
4.5.2查看保存数据
按“P/C”键开机或在开机测量界面下,长按“M”键,可查看保存的数据,在数据查看界面可以通过,“”或“”键,查看保存记录,当查看完毕,按“U/S”键退出。
4.6删除存储数据
①在测量界面,长按“M”键,进入数据查看界面后,短按“P/C”键,显示“ ”,或“
”,或“ ”,当显示“”,然后按“U/S”键,显示“”,即表示数据全部删除(本仪器无法逐条删除数据)。
”,当显示“”,然后按“U/S”键,显示“”,即表示数据全部删除(本仪器无法逐条删除数据)。
②在测量界面,长按“M”键,进入数据查看界面后,按“P/C”键,显示“”,继续按“P/C”键,切换显示“”,再按“U/S”键,直接回到测量界面,表示数据不删除。
4.7 系统设置

4.7.1 角度设置:可设置范围为0~999,用户可通过按“ ”键和“”键设置自己所需的数值。当角度显示999时,在往上加会循环变为0,同样当角度显示0是,按“”键往下减时,角度会跳到999。
”键和“”键设置自己所需的数值。当角度显示999时,在往上加会循环变为0,同样当角度显示0是,按“”键往下减时,角度会跳到999。
4.7.2 按键锁:针对预设目标扭力值。用户可通过按“”键和“”键来设置按键锁开启或者关闭,“1”为开启,“0”为关闭。
4.7.3 自动保存时间:可设置范围为0~5(秒),0表示关闭自动保存功能。用户可通过按“”键和“”键来设置自动保存时间。
4.7.4 蜂鸣器:设置蜂鸣器开启或者关闭。1为开启,0为关闭。用户可通过按“”键和“”键来设置蜂鸣器开启或者关闭。
4.7.5 振动器:设置振动器的开启或者关闭。1为开启,0为关闭。用户可通过按“”键和“”键来设置振动器开启或者关闭。
4.7.6 自动关机:自动关机时间设置,可设置范围为0~30(分钟)。0为关闭自动关机功能,用户可通过按“”键和“”键设置自己所需的自动关机时间。
4.7.7 恢复出厂设置:用户通过此功能可使仪器恢复出厂设置。通过按“”键和“”键来选择“”(恢复出厂设置)或者“”(不恢复出厂设置)。若选择恢复出厂设置,选择“”后迅速短按“U/S”键,液晶屏随后出现“”(已恢复出厂设置),并且系统自动返回到测量界面。若选择不恢复出厂设置,选择“”即可。
五、通信与上传数据
本扳手采用USB通信模式,可以将保存的数据上传到PC中,也可以将实时测量数据上传到PC中。
使用制造商提供的光盘,在电脑上安装好通讯软件,然后在数显扳手开机状态下用数据线连接数显扳手和电脑,双击软件图标,打开软件,先选择“Com No(端口号)”,再点击“Part Open”,然后点击“Upload”,这时表格上会出现本仪器内的存储数据,表示上位机已连接成功,已达到读取存储数据的目的。如下图所示:

通信设置:波特率4800,8位数据位,无奇偶校验,1个停止位。
通信格式:
3字节数据头 + 1字节功能码 + 2字节数据长度 + N字节数据长度 +1字节校验和
数据头: 0xEB 0x00 0x55
|
功能码 |
含义 |
例子 |
|
F0 |
PC机向扳手发送握手指令 |
指令:EB 00 55 f0 00 00 30 |
|
F1 |
扳手向PC机握手确认指令 |
返回指令:EB 00 55 F1 00 00 62 |
|
F5 |
PC机向扳手请求储存数据 |
指令:EB 00 55 f5 00 00 35 |
|
01 |
扳手发送量程数据 |
返回指令:EB 00 55 01 00 02 00 1E C2 |
|
02 |
扳手发送储存数据大小 |
返回指令:EB 00 55 02 00 02 00 06 94 |
|
03 |
扳手发送储存数据大小 |
返回指令:EB 00 55 03 00 12 00 01 00 00 00 04 00 00 00 00 00 02 00 00 00 00 00 00 B8 |
|
04 |
扳手发送数据已发完 |
返回指令:EB 00 55 04 00 00 88 |
|
FC |
PC请求实时数据 |
指令:EB 00 55 FC 00 00 3C |
七、提示信息
|
提示信息 |
含义 |
解决办法 |
|
ER-2 |
储存器异常 |
储存器已满,或储存器已损坏。清除储存数据或返厂维修。 |
|
ER-3 |
传感器或线路板异常 |
力值大于5%清零点,卸载力值再清零。 如卸载力值无法清除错误信息,返厂维修。 |
|
ER-4 |
超量程 |
超过满量程的120%将提示ER-4, 卸载力值后,按【P/C】键清除错误。 |
|
SUCC |
提示操作完成 |
一个操作完成,自动返回。 |
|
Fail |
提示操作失败 |
一个操作失败,自动返回。 |
八、保养与储存
8.1 注意:
为了维持良好精度,建议大约每一年需重新校正一次。
8.2 过扭力可能会造成损坏或精度损失(超过最大扭力范围105%)。
8.3 请勿将扳手剧烈摇晃或将扳手摔落地上。
8.4 不要把扳手当铁锤使用。
8.5 请勿将扳手放在高温、高湿度或是太阳直射的地方。
8.6 请勿在靠近水的地方使用扳手。
8.7 如果不小心将扳手弄湿,请立刻用干毛巾擦干。海水中的盐分可能会破坏扳手。
8.8 请勿使用有机溶剂清洁扳手,如酒精或是油漆稀释剂。
8.9 请勿将扳手靠近磁性物体。
8.10 请勿将扳手放置在灰尘或是砂子很多的地方,这会导致扳手严重的破坏。
8.11 请勿重压LCD屏幕。
九、随机附件
|
1 |
锂电池 |
1节 |
|
2 |
说明书 |
1份 |
|
3 |
电池盖钥匙 |
1个 |
|
4 |
合格证 |
1份 |
|
5 |
保修卡 |
1份 |
|
6 |
检查证明书 |
1份 |
|
7 |
干燥剂 |
1包 |



